Human's Social Signals during Error Situations in Human-Robot Interaction
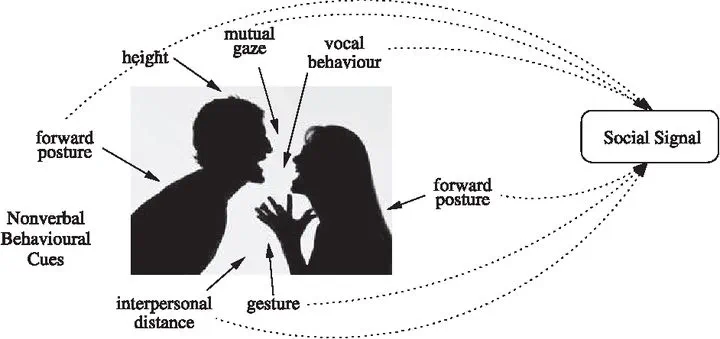 Social Signals and Non-verbal behavioural cues (Vinciarelli et al., 2012, p. 2)
Social Signals and Non-verbal behavioural cues (Vinciarelli et al., 2012, p. 2) During human-robot interactions, error situations caused by either the robot or human often affects those interactions and may also lead to termination. One of the variables the robots can analyse to recognize such error situations are the social signals from the human interaction partner. We investigated the verbal and non-verbal social signals that humans show while experiencing various error situations in a human-robot interaction to find if the humans show the same social signals or individual social signals. We manually annotated the multimodal social signals of humans by using 50 participant’s audio-video data collected from a recent human-robot interaction user study. With the audio-video recordings of 200 social norms violations, 200 execution errors and 200 planning errors by the robot a total of 600 error situations were annotated. Later, we prepared multimodal datasets from the manual annotations and used the datasets to train a rule learner PART, a Naive Bayes classifier and a Random Forest classifier. We evaluated the classifiers with 10-fold cross validation and percentage-split validation techniques. The results of this evaluation suggests the following: (1) The detection of different error situations works well when the robot has seen the human before. (2) Overall, Random Forest classifier and rule learner PART performed well for detecting different error situations when the robot is interacting with known and unknown humans. (3) The humans showed more social signals during the robot’s planning errors than in execution errors and social norms violations. (4) The classification of social norms violations mostly performed the worst but with some humans they were classified better than execution errors suggesting that the humans don’t show the same social signals. We also visualised the correlations between the social signals and the error types for each participant. We compared those visualisations between the participants and we found that the participants show individual social signals. We therefore conclude from our results that humans experiencing error situations in a human-robot interaction show individual social signals.