Rahul R. Ramachandran
Open Menu
Close Menu
About
Experience
Projects
Blog
Kinematics
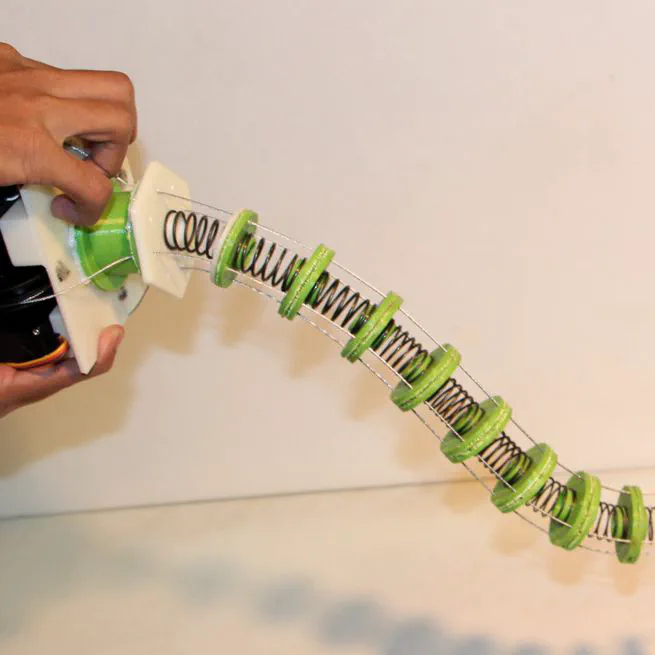
Modeling and Validation of New Continuum Robot Backbone Design With Variable Stiffness Inspired from Elephant Trunk
Oct 20, 2018